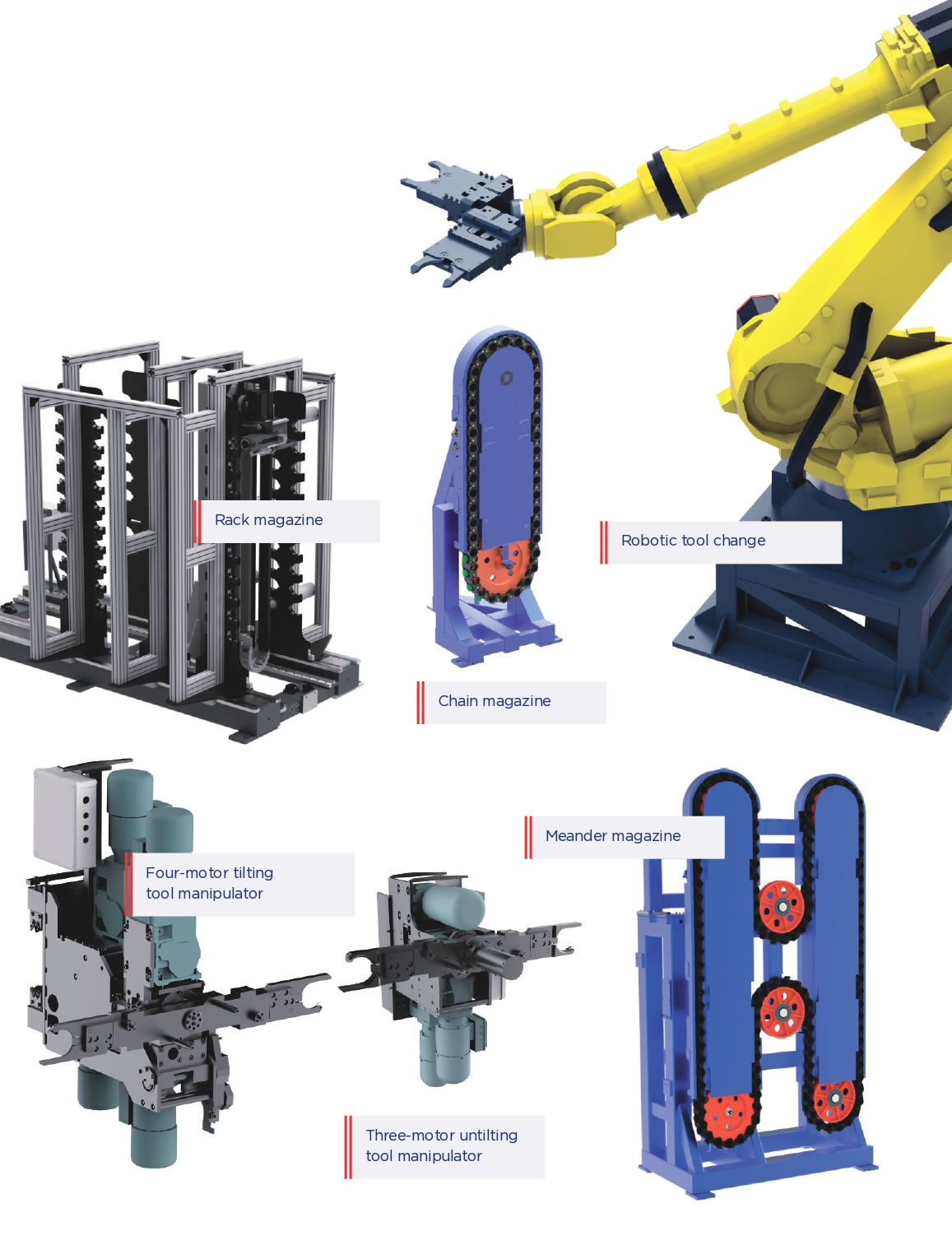
It consists of a chain meander- or rack-type magazine, a manipulator path on the column or rack and the actual manipulator equipped with a rotating two-arm hand. It is also possible to solve the tool change system using a robot. The tools are searched for milling heads in horizontal or vertical direction. It is possible to choose a variable number of storage sites on customer demand.